這次我們考慮一種新的差分輸入示波器PicoScope 4444如何幫助調試一個典型的DC / DC轉換器,該轉換器旨在為物聯網(IoT)應用提供電源。 最近的一篇文章“真正的差分范圍輸入如何提高探測安全性和精度”解釋了差分探測的好處,即允許工程師安全地探測傳統的單端示波器和探頭無法獲得的重要系統信號。 這種好處是通過消除接地返回路徑而產生的,接地返回路徑不僅可以破壞浮動信號,還可以導致系統獲得足夠的電流來破壞電路的某些部分,并且可能會傷害任何不幸的人,使其陷入困境!正如我們將展示的那樣,除了安全優勢之外,差分探測還可以讓工程師深入了解當代低壓電路。
推出多功能物聯網電池調節器
Intersil(對面)的簡單電池調節器電路說明了這一點,并為本文提供了一個有趣的測試案例。
乍一看,電感L1是接地還是浮動并不明顯(圖1b)。電感電流由開關設置決定,而開關設置又由V IN,V OUT和輸出負載的絕對電平決定。
 圖1 - PFM模式電池調節器IC。(a)外部電路(b)電感器引腳的內部開關。
圖1 - PFM模式電池調節器IC。(a)外部電路(b)電感器引腳的內部開關。
ISL9120介紹
ISL9120是一款遲滯的多模式電池電壓開關穩壓器,可在降壓,升壓或直通模式下工作。隨著輸入電壓下降,器件交換模式以維持穩定,從而擠壓給定電池的最大工作壽命。該操作范圍適用于許多現代電池化學品,范圍在1.8至5.5 V之間。該器件可將高達800 mA的電流驅動至負載,并且需要最少數量的外部元件,其中小功率電感和輸出電容是關鍵。
切換基礎知識 切換臺的主要優點是節能轉換。鏡片下方的部分聲稱標題效率為98%,并且在所有條件下都能保持85%以上(見圖2)。實現這一壯舉的原因在于滯后PFM(脈沖頻率調制)切換方法,即使在輕負載時也能保持效率。 開關穩壓器使用功率電感器作為其主要的能量存儲元件。操作依賴于將“桶”的能量從輸入端傳輸到電路的輸出端。每個開關周期傳遞的能量是開關速率和電感器尺寸的函數。在被檢查的電路中,一個微小的表面貼裝電感器可以完成這項工作。
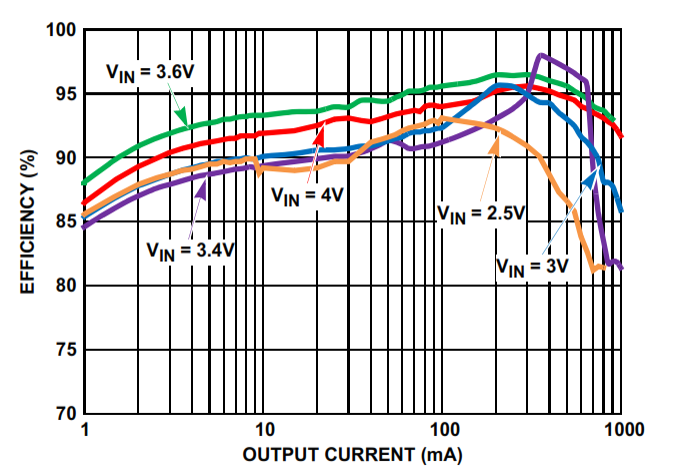 圖2 - ISL9120的轉換效率(Courtesy Intersil)
圖2 - ISL9120的轉換效率(Courtesy Intersil)
關于測試設置
上面的雙圖顯示左側的測試設置和右側的Intersil評估板。請注意,位于TP2和TP3(PCB中上部)的電感器上的示波器探頭利用“引腳和發條盒”探測方法來最小化探頭極之間的引線長度差異 - 這是減少振鈴的重要一步。
 圖3 - ISL9120評估板的測試設置和特寫顯示電感探測點(TP2和TP3)
圖3 - ISL9120評估板的測試設置和特寫顯示電感探測點(TP2和TP3)
此設置包括表中列出的標準實驗室設備,盡管可能并非每個人都可以使用I-prober的當前感知人才。該電流探頭采用新型磁傳感器,可以直接測量電流,無需斷開電路并引入檢測電阻。這非常有用,因為Intersil板不包含用于低歐姆檢測電阻的電橋,因此使電流測量比它需要的更復雜。
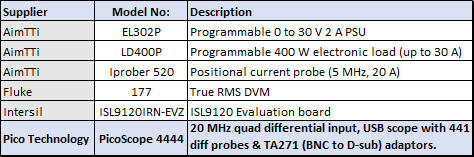
讓我們開始探索 四個內部IC電源開關環繞電感,確定電流(圖1b)。考慮到所有開關組合,很難解除其間可能存在的瞬時電壓。相反的走線(圖4)覆蓋了三個重要的電路信號,展示了這種電路典型的復雜開關波形: 紅色:輸出電壓紋波(交流耦合) 綠色:電感差分電壓(直流耦合) 藍色:電感電流 波形闡明了電路操作。綠色跡線顯示電感上出現的差分電壓。在這里,對于10個脈沖,電壓擺幅在0 V附近有限的3.4 V范圍內 - 這顯然由固定的3.4 V輸出設定。在第十一個脈沖上,擺動延伸到大約4.4 V的峰值,然后迅速下降到零(重振鈴)。當達到ISL9120的遲滯電壓限制時,會發生最后一次脈沖。 對于每個電感器電壓脈沖,電感器電流遵循線性斜坡。當能量從電感器傳輸到電容器(紅色跡線)時,每個電流脈沖“增長”輸出電容器(圖1a中的C2)上的正向電壓斜坡。 當V OUT達到穩壓器的上滯后閾值時,PFM脈沖停止。設備數據表明這比標稱輸出高1.5%。在固定的3.4 V輸出端,這意味著它高出約50 mV(即3.45 V)。當開關停止時,V OUT衰減回標稱值,此時PFM可以重新開始。 循環切換在固定的3.4 V DC上產生特征鋸齒波輸出紋波波形。紅色跡線顯示紋波的幅度約為±20 mV - 稍好于上面預測的50 mV。在此工作點,切換間隔為6.36μs(157 kHz)。 最后,請注意紋波波形正向邊緣的微小擾動。電感器兩端的快速斬波電壓會產生電噪聲。很明顯,這是這種輸出噪聲的起源。紅色和綠色跡線之間存在明顯的時間相關性。觀察藍色(電感器電流)跡線進一步增加了這一結論的重要性。 當差分電壓達到零伏時,電感電壓波形會有明顯的振鈴聲。顯然,用于進行該測量的無源探頭正在加載在其自身和電感器之間形成的槽。考慮到電感是微小的1μH,這是可以預期的。
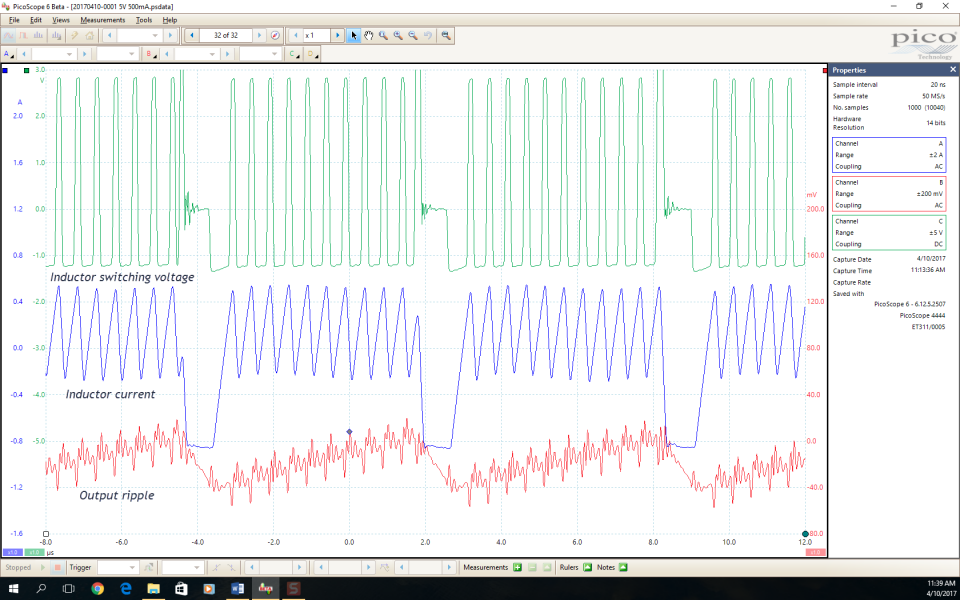 圖5 - 降壓操作(Vin = 5 V,Vout = 3.4 V,Iout = 500 mA)
圖5 - 降壓操作(Vin = 5 V,Vout = 3.4 V,Iout = 500 mA)
在低得多的負載下會發生什么? 圖中的工作條件保持不變(圖6),但負載電流減少20倍至25 mA。 不出所料,我們看到具有相似信號幅度的可比電感器行為。也就是說,在輕負載條件下,電感電流沒有直流偏移分量。但是,隨著負載下降,PFM突發間隔已延長。這是由所需的負載能量顯著降低引起的。 現在只發生六個PFM脈沖,但它們之間的關閉時間明顯延長。這種差異反映在較慢的輸出紋波率 - 已經翻倍至13.7μs(73 kHz)。請注意,紋波幅度減半,僅為±13 mV。
 圖6 - 降壓操作(Vin = 5 V,Vout = 3.4 V,Iout = 25 mA)
圖6 - 降壓操作(Vin = 5 V,Vout = 3.4 V,Iout = 25 mA)
中期結論 - 降壓模式 對于PFM穩壓器,輕負載會導致輸出紋波頻率和電壓幅度降低。PFM脈沖突發之間的時間隨著負載的增加而增加。通過限制典型的固定頻率PWM(脈沖寬度調制)穩壓器的動態開關損耗,關斷時間可以提高低負載效率。 現在讓我們考慮升級操作。
升壓操作(V IN <V OUT)
設置:V IN = 2.0 V,V OUT = 3.4 V,I O = 250 mA
痕跡:
紅色:輸出電壓紋波= 64 mV
綠色:電感差分電壓(直流耦合)
藍色:電感電流
這一次,穩壓器接近其最小輸入電壓。仔細檢查波形(圖7)表明,電感器電壓行為仍然與降壓情況類似。
電感電流上升清晰可見藍色。在擊中第八個脈沖之前,電感電流在七個脈沖上擺動±300 mA,此時調節器的上限滯后極限被擊中。電感電流崩潰,導致PFM過程開始之前輸出紋波的負向擺動。
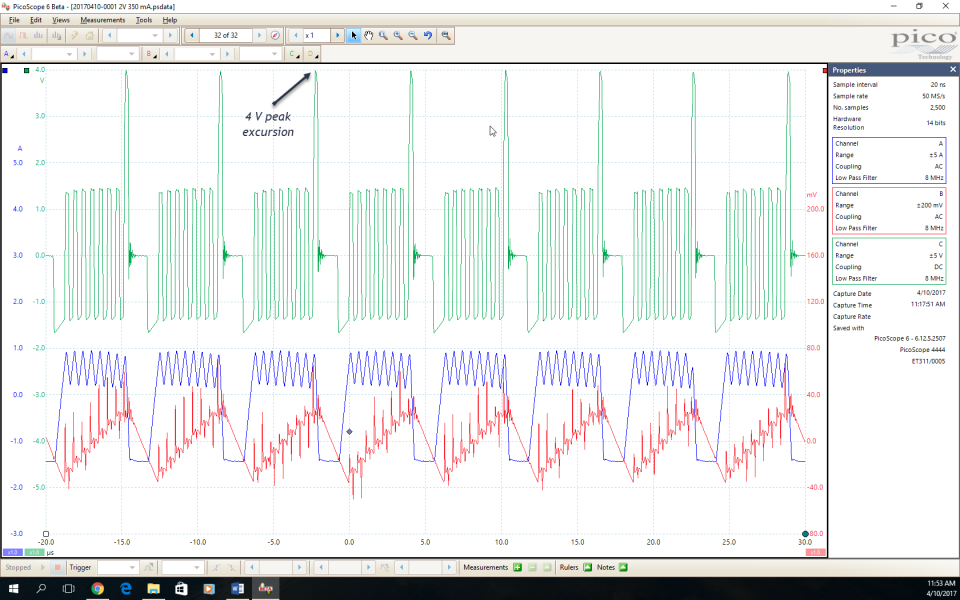 圖7 - 升壓操作(VIN = 2.0 V,VOUT = 3.4 V,IOUT = 250 mA
圖7 - 升壓操作(VIN = 2.0 V,VOUT = 3.4 V,IOUT = 250 mA
旁路運行(V IN ≈V OUT)
靜態設置條件:V IN = 3.45 V,V OUT = 3.4 V,無負載
痕跡:
紅色:輸出電壓斜坡
綠色:輸入電流峰值
藍色:電感電流
該跡線(圖8)顯示了輸入與輸出電壓緊密匹配時的操作 - 即在旁路模式下工作時。上部跡線顯示電感器上的正向和負向瞬態電壓短路。
這次電感電流看起來明顯不同。
圖8中的標尺顯示電感電流波形的負向邊緣約為300 mA - 與其他模式一致。該邊沿表示從電感器中抽出的能量,對輸出電容器充電,導致紋波電壓上升。開關頻率為295 kHz。
當PFM開關打開時,電感電流迅速下降約500 mA。在這種情況下,振鈴發生在輸出紋波波形的下降沿。
與其他工作模式一樣,降低負載會導致開關頻率的預期下降。顯示25 mA負載(圖9)時,頻率降至62 kHz。
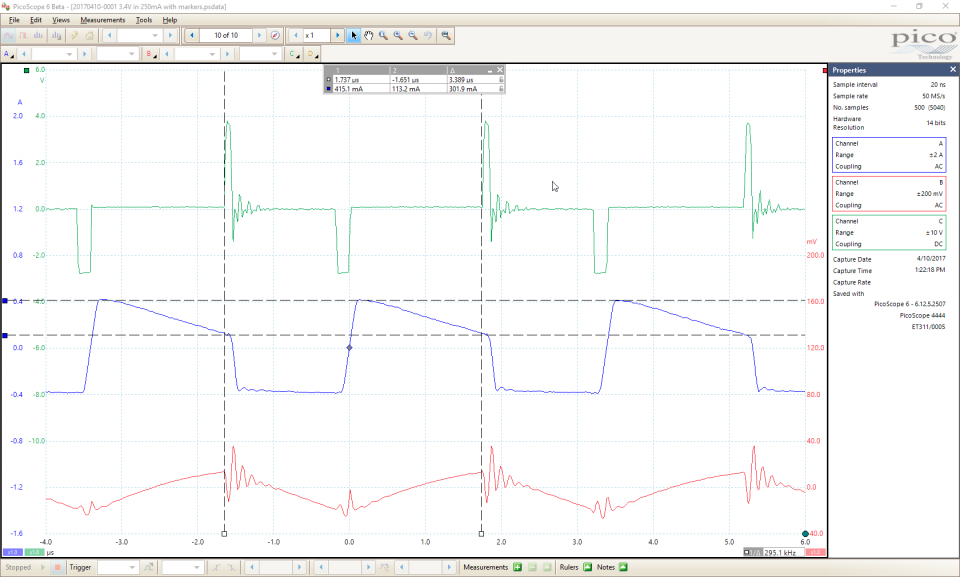 圖8 - 旁路運行(Vin = 3.4 V,Vout = 3.4 V,250 mA負載)
圖8 - 旁路運行(Vin = 3.4 V,Vout = 3.4 V,250 mA負載)
 圖9 - 25 mA負載的旁路模式
圖9 - 25 mA負載的旁路模式
結論 能夠在PicoScope 4444的高共模抑制的幫助下查看真正的差分信號,有助于對具有浮動節點的系統進行快速系統調試。在PFM穩壓器的情況下,建立了電感器電流及其對輸出電壓紋波性能的影響。這證明了設備控制系統的效果:即PFM脈沖數量的下降和開關速率導致在較輕負載下紋波頻率和幅度同時下降,而與工作模式無關。 探測電感有助于識別輸出電壓噪聲的來源,即PFM電流脈沖作用于其自身的噪聲。很明顯,被動探測調節器使用的小電感加載了電路,加劇了幾條走線中出現的振鈴。 從閱讀中看不出這一事實是PicoScope 4444提供了幾個簡化本文所述測試性能的功能。在未來的功能中提到這一點非常重要。 最后,雖然用于此次審核的切換器類型非常高效且易于部署,但它并不適合所有應用程序。變頻操作使EMI控制成為一項挑戰。因此,PFM穩壓器在精密和敏感無線電應用中的應用較少。 如果能夠獲得真正的差分探測功能,您會解決哪些調試問題?我們很想聽到您的聲音!